Step motorlar ( adım motorları ) Step motorlar ( adım motorları )
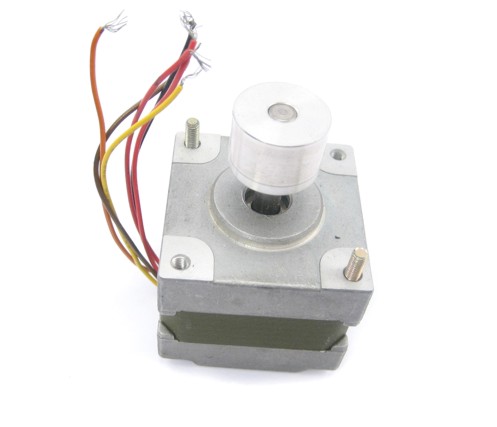
Step motorlar ortada mıknatıs veya metalden oluşan rotor ile statotoru çevreleyen ve üzerinde elektromanyetik alan etkisi yaratarak gerilim indüklemesi meydana getiren bobinlerden oluşan ve bir tam devrini küçük adımlara çevirebilen elektrik motorlarıdır.
 Yandaki step motorun çalışma mantığını açıklamak için basit bir animasyondur. Step motorlar bir merkez dişli ve bu dişlinin etrafında çok sayıda bobin içerir. Bu bobinlere mikrodenetleyici gibi bir kontrol devresiyle sinyal verilir ve manyetik etkileşim sayesinde dönme hareketi gerçekleşir. Merkez çarkın dişleri ilk bobine hizalandığında bir sonraki bobine sinyal verilerek ilk elektromıknatıs kapanıp, ikincisi açıldığında merkez çark biraz daha dönecektir. Her bir küçük dönüşe adım denir. Yandaki step motorun çalışma mantığını açıklamak için basit bir animasyondur. Step motorlar bir merkez dişli ve bu dişlinin etrafında çok sayıda bobin içerir. Bu bobinlere mikrodenetleyici gibi bir kontrol devresiyle sinyal verilir ve manyetik etkileşim sayesinde dönme hareketi gerçekleşir. Merkez çarkın dişleri ilk bobine hizalandığında bir sonraki bobine sinyal verilerek ilk elektromıknatıs kapanıp, ikincisi açıldığında merkez çark biraz daha dönecektir. Her bir küçük dönüşe adım denir.
 Ne kadar çok sayıda bobin varsa o kadar küçük adımlar ve sonuç olarak da daha hassas kontrol sağlanacaktır. Hassas kontrollere uygunluklarından dolayı step motorlar endüstride kullanılırlar. Robot kol uygulamaları ve laboratuar robotları gibi hassas uygulamalara da uygundurlar. Step motorların ağır olmaları, yüksek akım çekmeleri, torklarının düşük olması ve robot çalışmalarında monte edilmesinin zorluğu gibi sebeplerden dolayı kullanım alanları daralmaktadır. Ne kadar çok sayıda bobin varsa o kadar küçük adımlar ve sonuç olarak da daha hassas kontrol sağlanacaktır. Hassas kontrollere uygunluklarından dolayı step motorlar endüstride kullanılırlar. Robot kol uygulamaları ve laboratuar robotları gibi hassas uygulamalara da uygundurlar. Step motorların ağır olmaları, yüksek akım çekmeleri, torklarının düşük olması ve robot çalışmalarında monte edilmesinin zorluğu gibi sebeplerden dolayı kullanım alanları daralmaktadır.
>>Step motorlar hakkında detaylı bilgi için tıklayınız.
 DC motorlar DC motorlar
DC motorlar robotikte en çok kullanılan motorlardır. DC motorlarda step motorlardaki bobinler yerine mıknatıslar yer alır. DC motorlar piyasa da farklı çalışma voltajına ve rpm değerlerine sahip redüktörlü ya da redüktörsüz pek çok çeşitte bulunabilmektedir. DC motorların hız kontrolleri pwm ile yapılabilir. Robot motoru olarak kullanmak için ideal motorlardır.
>>DC motorlar hakkında detaylı bilgi için tıklayınız.
Servo motorlar
 Servo motorlar özellikle kontrolleri çok kolay olduğundan herhangi bir kontrol devresi gerektirmediklerin robot çalışmalarında sıklıkla kullanılır. Kontrol devreleri kendi içlerindedir. Özellikle de küçük boyutlarda motor kullanımı gerektiren robotlarda (mini sumo robot, böcek robotlar gibi) tercih edilirler. Servo motorlar özellikle kontrolleri çok kolay olduğundan herhangi bir kontrol devresi gerektirmediklerin robot çalışmalarında sıklıkla kullanılır. Kontrol devreleri kendi içlerindedir. Özellikle de küçük boyutlarda motor kullanımı gerektiren robotlarda (mini sumo robot, böcek robotlar gibi) tercih edilirler.
DC servo motorlar çok küçük güçlerden çok büyük güçlere kadar imal edilirler(0,05 Hp den 1000 Hp ye kadar). Bu motorlar klasik DC motorlar gibi imal edilirler. Bu motorlar küçük yapılıdır ve endüvileri (yükseklik . uzunluk / Çap oranıyla) kutup atalet momentini minimum yapacak şekilde tasarlanırlar. Küçük çaplı ve genellikle içerisinde kompanzasyon sargısı olan, kuvvetli manyetik alanı boyu uzun doğru akım motorlarına da servo motor denir.
Servo motorlar 10 $ ile 3500 $ arası fiyatlara sahiptir. Sanayide servo sistemlerde kullanılan doğru akım motorlarına DC servo motor denir. DC servo motorların kontrolü için genellikle ''elektronik hareketli denetleyiciler'' adı verilen servo sürücüler kullanılır. Servo sürücüler servo motorun hareketini kontrol ederler. Kontrol edilen büyüklükler çoğu zaman noktadan noktaya konum kontrolü, hız kontrolü ve ivme programlamasıdır. PWM (darbe genişlik modülasyonu) genellikle robot kontrol sistemlerinde, sayısal kontrol sistemlerinde ve diğer konum denetleyicilerinde kullanılırlar.
DC servo motorların çalışma prensiplerine bakacak olursak:
Manyetik alan ile içinden akım geçirilen iletkenler arasındaki etkileşim nedeniyle bir döndürme momenti meydana gelir. Bu döndürme momenti manyetik alan vektörü ile sargı akım vektörü arasındaki açı 90° olduğunda maksimum değerine ulaşır. Bir DC servo motorda fırçaların konumları, her iki dönüş yönü için de döndürme momenti açısının 90° olmasını sağlayacak şekilde belirlenmiştir. Kollektör segmentlerinin fazla olması neticesinde momentin sıfır bir noktada rotorun hareketsiz kalması engellenmiş olur.
Servo motorlar her ne kadar kolay kontrol ve monte edilebilme, robot projelerine uygunluk ve kendi dişli kutusunu bulundurmaları gibi avantajlı özelliklere sahip olsalar da ; pahalı olmaları , düşük torkları ve etkisiz hız kontrolleri nedeniyle dc motorlar kadar çok tercih edilmemektedirler.
>>Servo motorlar hakkında detaylı bilgi için tıklayınız.
* Bu makale Robotiksistem tarafından hazırlanmıştır. Robotiksistem.com kaynak gösterilmek kaydıyla kullanılabilir. |