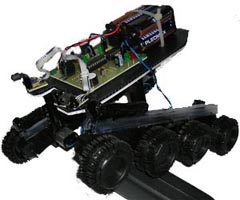
Engelden kaçan robot V3 özel gövde tasarımı ile engeller üzerine tırmanarak engelleri geçebilir. Aşamayacağı yükseklikteki engeller ile karşılaştığında ise yönünü değiştir. Engelden kaçan robot V3 özel gövde tasarımı ile engeller üzerine tırmanarak engelleri geçebilir. Aşamayacağı yükseklikteki engeller ile karşılaştığında ise yönünü değiştir.
Robot üzerinde engelden kaçan robotun ilk versiyonda olduğu gibi iki adet engel algılama sensörü bulunur.
Engelden kaçan robot V3 6 adet alkalin kalem pil ile çalışmaktadır.
Engelden kaçan robot ana devresi üzerinde; pic devresi (PIC16F628A), voltaj regülatörü (LM7805) ve motor sürücü devre (L293D motor sürücü entegresi) bulunmaktadır.
Engelden kaçan robot üzerinde sağda ve solda birer tane olmak üzere 2 adet engel algılama sensör devresi kullanılmıştır.
Engel algılama sensörleri TSOP1738 IR alıcı modül ve IR led kullanılarak hazırlanmıştır.
| Engelden Kaçan Robot V3 Videosu |
|
|