Boğa 'da iki adet redüktörlü DC motor, 5 adet IR alıcı verici sensör, 4 adet CNY70 kontrast sensörü kullanıldı.
Boğa 'nın Videosu
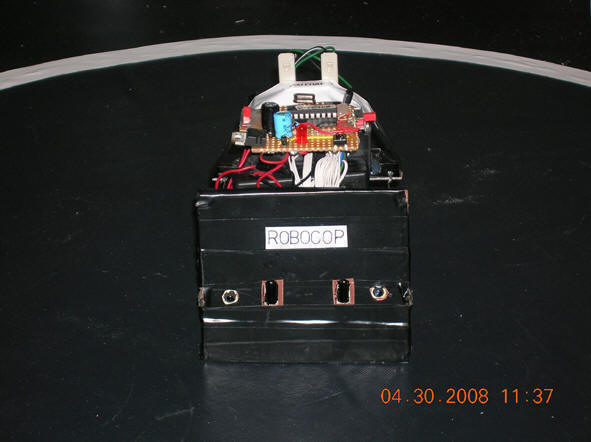
Robocop Mini Sumo Robot
Robocop 'da iki adet DC motor, 4 adet IR alıcı verici sensor devresi ve 2 Adet CNY70 kontrast sensörü bulunuyor.
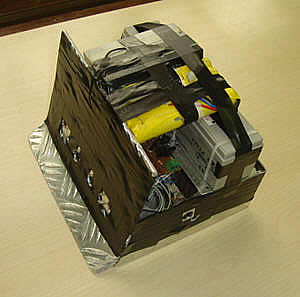
Canavar Mini Sumo Robot
Canavar 'da iki adet DC motor, 4 adet IR alıcı verici sensör ve 2 Adet CNY70 kontrast sensörü kullanıldı.
Körfizci Çizgi İzleyen Robot
Körfizci 'de 4 adet CNY70 kontrast sensörü kullanıldı. Robot PIC16F628A ile kontrol ediliyor. Motor sürücü devre BDX53 darlington transistörler ile hazırlandı.