PİN ADI |
ÖZELLİKLER |
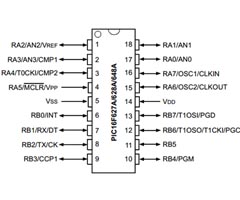
| RA0/AN0-RA1/AN1 |
Port A 'nın iki yönlü digital I/O pinleri/ Analog komparatör girişleri |
| RA2/AN2/Vref |
Port A 'nın iki yönlü digital I/O pini/ Analog komparatör girişi/ Vref girişi |
| RA3/AN3/CMP1 |
Port A 'nın digital I/O pini/ Analog komparatör girişi/ Komparatör çıkışı |
| RA4/T0CKI/CMP2 |
Port A 'nın digital I/O pini/ TIMER1 harici clock girişi / Komparatör çıkışı |
| RA5/MCLR/THV |
Port A 'nın digital I/O pini / Reset girişi ya da programlama sırasında gerilim giriş ucu/ THV girişi |
| RA6/OSC1/CLKOUT |
Port A 'nın digital I/O pini / kristal osilatör girişi |
| RA7/OSC2/CLKOUT |
Port A 'nın digital I/O pini / kristal osilatör girişi / harici clock girişi |
| RB0/INT |
Port B 'nin digital I/O pini / Harici kesme girişi |
| RB1/RX/DT |
Port B 'nin digital I/O pini / USART veri alış pini/ senkronize data I/O pini |
| RB2/TX/CK |
Port B 'nin digital I/O pini / USART veri gönderme pini/ Senkronize clock I/O pini |
| RB3/CCP1 |
Port B 'nin digital I/O pini / Capture-Compare - PWM I/O |
| RB4/PGM |
Port B 'nin digital I/O pini / düşük gerilim programlama giriş pini. Pin 'deki seviye değişikliği SLEEP moduna giren PIC 'i uyandırır. |
| RB5 |
Port B 'nin digital I/O pini / Pin 'deki seviye değişikliği SLEEP moduna giren PIC 'i uyandırır. |
| RB6/T1OSO/T1CKI |
Port B 'nin digital I/O pini / Timer osilatör çıkışı / Timer1 clock girişi |
| RB7/T1OSI |
Port B 'nin digital I/O pini / Timer1 osilatör çıkışı |
| Vss |
Güç kaynağının GND ucunun bağlanacağı pin |
| Vdd |
Güç kaynağının pozitif ucunun bağlanacağı pin |