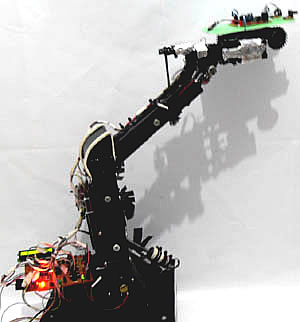
TERMIT 2 ( Mine Searching and Exploring Robot ) |
 Termit is a mine searching and exploring robot and is studied with solar energy. It was made in 2006. It's fully autonomous and remote control.The robot uses 6 dc motors to move the wheels, camera and robot arm. I use one PIC16F877A and PIC16F628A and two R/C devices. I use several mosfet for motor drives. To avoid obstacles I use five IR-sensors that give a picture of what the robot is approaching. From that information the robot decides if it should go to the left or the right. And if this robot detections a mine, it will transmit a signal to control center. The four wheels of termit have encoders. With those encoders Termit can save and transport the data of the path and also the coordinates of the founded points. The coordinate system of the Termit is an x-y system with a reference point that was taken from Termit's start point. Termit is a mine searching and exploring robot and is studied with solar energy. It was made in 2006. It's fully autonomous and remote control.The robot uses 6 dc motors to move the wheels, camera and robot arm. I use one PIC16F877A and PIC16F628A and two R/C devices. I use several mosfet for motor drives. To avoid obstacles I use five IR-sensors that give a picture of what the robot is approaching. From that information the robot decides if it should go to the left or the right. And if this robot detections a mine, it will transmit a signal to control center. The four wheels of termit have encoders. With those encoders Termit can save and transport the data of the path and also the coordinates of the founded points. The coordinate system of the Termit is an x-y system with a reference point that was taken from Termit's start point.
|
|
|
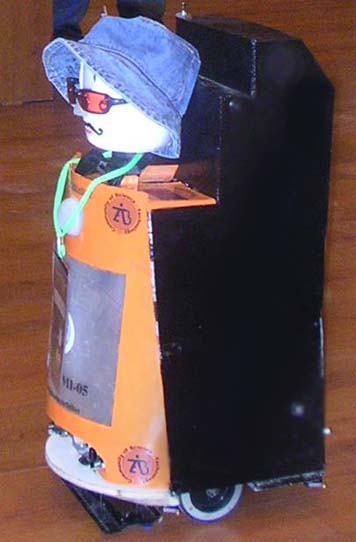
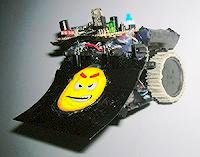
ROBO-MI05 ( Security and Cleaning Robot ) |
 Robo-MI05 was made in 2005 for a competition organised by Middle East Technical University in Turkey and was awarded as the first. It is an indoor mobile robot. Robo-MI05 is completely autonomous and also can be remote controlled when it is wanted. Its mission is security and cleaning. It has an RC camera in order to transport the view to the computer. It has also two motion sensors to detect the obstacles or a movement. Its cleaning ability is provided with a vacuum broom which was made of a plastic cup. Robo-MI05 was made in 2005 for a competition organised by Middle East Technical University in Turkey and was awarded as the first. It is an indoor mobile robot. Robo-MI05 is completely autonomous and also can be remote controlled when it is wanted. Its mission is security and cleaning. It has an RC camera in order to transport the view to the computer. It has also two motion sensors to detect the obstacles or a movement. Its cleaning ability is provided with a vacuum broom which was made of a plastic cup.
Robo-MI05 works in two ways. First, it autonomously works in a given environment by avoiding the obstacles without crushing them and sweeps. Second, man can watch its every movement with its mini RC camera and gives it commands by using a pc. Therefore, Robo-MI05 can be used as an exploring robot. When it has finished its cleaning mission, it is placed in a position at which it can see whole room. When it waits in that position Robo-MI05 is in stand-by position. Its RC camera is closed but its motion sensors are active. Whenever it motion sensors detects a movement it makes its RC camera became active and performs its security mission. It was programmed in C programming language. |
|
|
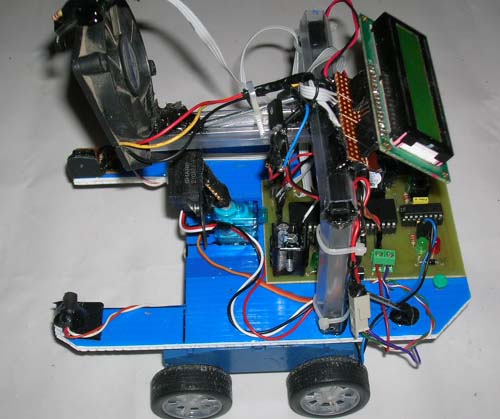
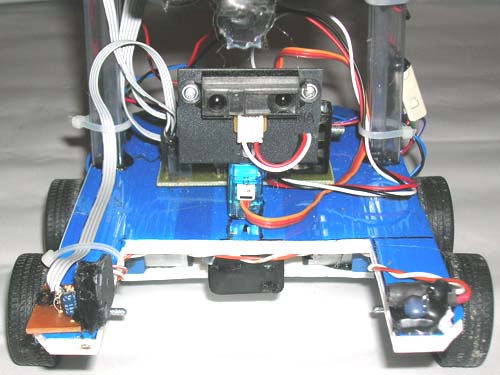
FIRE-BOT |
|
Fire-Bot is an autonomous mobile robot project, that can find the candles and blow them out.
Fire-Bot is controlled by PIC16F877A. It has two DC motors and a servo motor. The DC motors are controlled with L293D integrated motor driver by using PWM of PIC16F877A.
To detect the candles Fire-Bot uses its Sharp GP2Y0A21YK0F sensor and to determine whether or not it is close enough to the candle the robot has also a TSOP1738 IR sensor. At the beginning Fire-Bot measures the room's temperature with DS1821 temperature sensor placed on the fan and takes this temperature as the reference. When Fire-Bot catched the candle, it measures temperature and turns on the fan in order to blow the candle out. After the candles is blowed out, the fan is turned off.
|
|
|
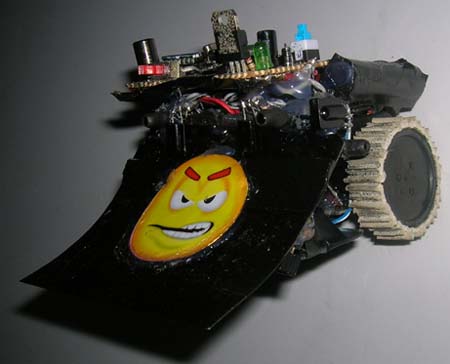
TERMINATOR ( Mini Sumo Robot) |
 Terminator is a mini sumo robot with four mini dc motors. Its motors are powerfull Faulhaber motors and its wheels provide a good friction in order to be not pushed out of the arena. It has five IR sensors to detect its competitor. Two of them are on the front face, two of them are on the right and left faces and one is on the back. It is controlled by PIC16F628A microcontroller. There are two CNY70 sensors under the robot body to detect the white path around the arena. Terminator is a mini sumo robot with four mini dc motors. Its motors are powerfull Faulhaber motors and its wheels provide a good friction in order to be not pushed out of the arena. It has five IR sensors to detect its competitor. Two of them are on the front face, two of them are on the right and left faces and one is on the back. It is controlled by PIC16F628A microcontroller. There are two CNY70 sensors under the robot body to detect the white path around the arena.
Terminator is the champion of the International Robotic Days in 2009 organised by Middle East Technical University.
2009 UORG Mini Sumo Robot
Final Match |
|
|
|
|
|

Picker is a line following robot that detects the obstacles. When it sees an obstacle, Picker stops, grabs the obstacle with its hand and throw the obstacle in its wagon. Then it continues to follow the path.
 See more details See more details
|
|
|
ERASER ( Mini Sumo Robot) |
 Eraser has two mini Faulhaber dc motors which are also used by Terminator. Its body is specifically designed to push its opponent. It has four IR sensors to detect its competitor and two CNY70 sensors to detect the white path around the arena. It is controlled by PIC16F628A. Eraser has two mini Faulhaber dc motors which are also used by Terminator. Its body is specifically designed to push its opponent. It has four IR sensors to detect its competitor and two CNY70 sensors to detect the white path around the arena. It is controlled by PIC16F628A.
Eraser has got the Second Place of the Robot Competition organised by Istanbul Technical University in 2008.
|
|
|
SYMIRNA ( Line Follower Robot) |
 Symirna is a fast line follower robot. It has two geared dc motors which are only 200 rpm. Despite of this low rpm of its motors, its design makes it fast. It has four CNY70 reflective optosensors to detect the white path on black surface. It is controlled by PIC16F628A. Its motor driver circuit was prepared with L293D. Symirna is a fast line follower robot. It has two geared dc motors which are only 200 rpm. Despite of this low rpm of its motors, its design makes it fast. It has four CNY70 reflective optosensors to detect the white path on black surface. It is controlled by PIC16F628A. Its motor driver circuit was prepared with L293D.
Symirna is the winner of the Line Following Robot Category of Robot Competition in 2008 organised by Istanbul Technical University and the third of the National Robot Competition in 2008 organised by Aegean Region Chamber of Industry.
| Smyrna Line Follower Robot |
|
|
|
|
| Discoverer Mobile Robot with RF Control |
 This is a mobile robot designed with a special mechanical system. It has 6 powerful geared DC motors. The robot can be controlled via RF control circuit, which has 433 MHz RF receiver and transmitter module. Robot has also an RF camera mounted on a mini servo motor. Thus, the camera can be also moved and controlled by the remote controller and transmit the data to a computer. There are solar panels on the robot, that are used to recharge its batteries. The robot turns on the light which are mounted in front of it, when it detects that its is dark outside. It uses a LDR sensor to detect the light. This is a mobile robot designed with a special mechanical system. It has 6 powerful geared DC motors. The robot can be controlled via RF control circuit, which has 433 MHz RF receiver and transmitter module. Robot has also an RF camera mounted on a mini servo motor. Thus, the camera can be also moved and controlled by the remote controller and transmit the data to a computer. There are solar panels on the robot, that are used to recharge its batteries. The robot turns on the light which are mounted in front of it, when it detects that its is dark outside. It uses a LDR sensor to detect the light.
|
|
|
| |