ROBOTICS ROBOTICS
 Robotics is the engineering science and technology which involves the conception, design, operation and manufacture of robots. Electronics, mechanics and software are brought together by robotics. Robotics is the engineering science and technology which involves the conception, design, operation and manufacture of robots. Electronics, mechanics and software are brought together by robotics.
Robots are used for jobs that are dirty, dull and dangerous. Today robotics have many different application areas. Some of those are:
 Outer Space Applications: Manipulative arms that are controlled by a human are used to unload the docking bay of space shuttles to launch satellites or to construct a space station. Outer Space Applications: Manipulative arms that are controlled by a human are used to unload the docking bay of space shuttles to launch satellites or to construct a space station.
Military Robot Applications: In today's modern army robotics is an important factor which is researched and developed day by day. Already remarkable success has been achieved with unmanned aerial vehicles like the Predator drone, which are capable of taking surveillance photographs, and even accurately launching missiles at ground targets, without a pilot. There are many advantages in robotic technology in warfare however, as outlined by Major Kenneth Rose of the US Army's Training and Doctrine Command: "Machines don't get tired. They don't close their eyes. They don't hide under trees when it rains and they don't talk to their buddies...
A human's attention to detail on guard duty drops dramatically in the first 30 minutes ... Machines know no fear."
Intelligent Home Applications: We can monitor home security, environmental conditions and energy usage with intelligent robotic home systems. Door and windows can be opened automatically and appliances such as lighting and air conditioning can be pre programmed to activate. This assists occupants irrespective of their state of mobility.
Exploration: Robots are used to explore the area that are dangerous and harmfull for humans such as volcanos, oceans and other planets. NASA has used robotic probes to explore in space.
Industry: From the beginning of the industrial revolution robotics and automation becomes the most important part of manufacturing. Robotic arms which are able to perform multiple tasks such as welding, cutting, lifting, sorting and bending are used in fabrics.
Health Service: Under development is a robotic suit that will enable nurses to lift patients without damaging their backs. Scientists in Japan have developed a power-assisted suit which will give nurses the extra muscle they need to lift their patients - and avoid back injuries.
HISTORY OF ROBOTICS
The history of robotics dates back to Ancient Greeks. Greek mythology had at least one instance of robots: the mechanical servants of the Greek god of technology, fire, and the forge, Hephaestus.
In 1206 Al-Jazari created the earliest form of programmable humanoid robots which was an automaton. This automaton appeared as four musicians on a boat in a lake and it had a programmable drum machine with pegs that bump into little levers that operated the percussion. Al-Jazari had many other automatons.
In 1945 Leoanardo Da Vinci a humanoid automaton in knight's armor to entertain which was not known if it was ever built actually.
 Johannes Müller von Königsberg created an automaton eagle and fly made of iron; both could fly in 1533. Johannes Müller von Königsberg created an automaton eagle and fly made of iron; both could fly in 1533.
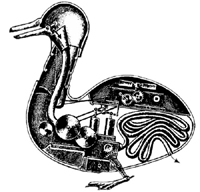
Jacques De Vaucanson created some of the most famous automatons in 1737. His most famous work was The Digesting Duck which was capable of imitating a real duck by flapping its wings, eat grain, digest it, and defecate and was powered by weights.
In 1800s, the Japanese craftsman Hisashige Tanaka (17991881), known as "Japan's Edison" or "Karakuri Giemon", created an array of extremely complex mechanical toys, some of which served tea, fired arrows drawn from a quiver. Nikola Tesla demonstrated a radio-controlled torpedo.
The first person who used the word robot was a play author Karel Capek in his 1921 play, creating the word from the Czech word robota, meaning servitude.
In 1928, Japan's first robot, Gakutensoku, was designed and constructed by biologist Makoto Nishimura.
In the 1930s, they created a humanoid robot known as Elektro for exhibition purposes, including the 1939 and 1940 World's Fairs.
In 1940 Issac Asimov produced a series of short stories about robots starting with "A Strange Playfellow" for Super Science Stories magazine whose story was about a robot and its affection for a child that it was bound to protect. Over the next 10 years he produced more stories about robots that were eventually recompiled into the volume "I, Robot" in 1950.
Asimov was generally credited with the popularization of the term "Robotics" which was first mentioned in his story "Runaround" in 1942. But probably Issac Asimov's most important contribution to the history of the robot is the creation of his Three Laws of Robotics:
- A robot may not injure a human being, or, through inaction, allow a human being to come to harm.
- A robot must obey the orders given it by human beings except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Asimov later added a "zeroth law" to the list:
Zeroth law: A robot may not injure humanity, or, through inaction, allow humanity to come to harm.
 Alan Turing published Computing Machinery and Intelligence in which he proposed a test to determine whether or not a machine has gained the power to think for itself. It becomes known as the "" in 1950. Alan Turing published Computing Machinery and Intelligence in which he proposed a test to determine whether or not a machine has gained the power to think for itself. It becomes known as the "" in 1950.
George Devol invented the first truly modern robot called the Unimate which was digitally operated and programmable in 1954. Unimate was sold to General Motors in 1960 and it was installed in 1961 in a plant in Trenton, New Jersey to lift hot pieces of metal from a die casting machine and stack them.
In 1959 John McCarthy and Marvin Minsky started the Artificial Intelligence Laboratory at the Massachusetts Institute of Technology (MIT) an then he leaved MIT in 1963 to start the Artificial Intelligence Laboratory at Stanford University. After his starting this laboratory the Stanford Research Institute (later to be known as SRI Technology) created Shakey the first mobile robot to know and react to its own actions. Amongst other achievements SRI was also the research institute that helped bring us modern day laundry detergent in the development of Tide in 1966. In the same year, an artificial intelligence program named ELIZA is created at MIT by Joseph Weizenbaum. ELIZA functions as a computer psychologist that manipulates its users statements to form questions. Weizenbaum was disturbed at how quickly people put faith in his little program.
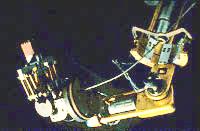 In 1969 Victor Scheinman, a Mechanical Engineering student working in the Stanford Artificial Intelligence Lab (SAIL) creates the Stanford Arm and today the design of this arm influences the design of robot arms. In 1969 Victor Scheinman, a Mechanical Engineering student working in the Stanford Artificial Intelligence Lab (SAIL) creates the Stanford Arm and today the design of this arm influences the design of robot arms.
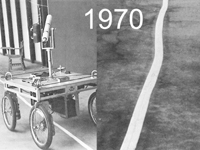
In 1970 Stanford University produced the Stanford Cart which is designed to be a line follower but also was able to be controlled from a computer via radio link.
Victor Scheinman formed his own company and started marketing the Silver Arm, that was capable of assembling small parts together using touch sensors in 1974.
 Soft Gripper was designed by Shigeo Hirose to to wrap around an object in snake like fashion in 1976. Soft Gripper was designed by Shigeo Hirose to to wrap around an object in snake like fashion in 1976.
In 1978 the 4 axis robot arm SCARA, Selective Compliance Assembly Robot Arm, was created. It was the best used for picking up parts and placing them in another location and it was introduced to assembly lines in 1981.
The Stanford Cart built in 1970 was rebuilt by Hans Moravec by adding a more robust vision system allowing greater autonomy in 1979 These were some of the first experiments with 3D environment. mapping.
In 1981 Takeo Kanade built the direct drive arm, that was the first to have motors installed directly into the joints of the arm. This change caused this design to become faster and much more accurate than previous robotic arms.
In 1986 LEGO and the MIT Media Lab colaborated to bring the first LEGO based educational products to market. LEGO tc Logo was used by in the classrooms of thousands of elementary school teachers. In the same year Honda began its humanoid research and development program to create robots capable of interacting successfully with humans.
In 1989 at MIT a hexapodal walking robot named Genghis, that used 4 microprocessors, 22 sensors, and 12 servo motors, was unveiled by the Mobile Robots Group MIT and Rodney Brooks and A. M. Flynn published the paper "Fast, Cheap and Out of Control: A Robot Invasion of the Solar System" in the Journal of the British Interplanetary Society. The paper changed rover research from building the one, big, expensive robot to building lots of little cheap ones, and it also maked the idea of building a robot somewhat more accessible to the average person.
In 1993 an eight legged robot was developed at Carnegie Mellon University called Dante to collect data from a harsh environment similar to what we might find on another planet. However, Dante failed to collect gases from because of a broken fiber optic cable. In 1994 Dante II, a more robust version of its predicessor, descended into the crater of Alaskan volcano Mt. Spurr and completed the mission with a success.
.gif) Robotuna was a biomimetic robot that was designed to swim and resemble a blue fin tuna and built by David Barrett for his doctoral thesis at MIT in 1996. Robotuna was a biomimetic robot that was designed to swim and resemble a blue fin tuna and built by David Barrett for his doctoral thesis at MIT in 1996.
Honda's P2 humanoid robot was first shown in 1996. Standing for Prototype Model 2, P2
was an integral part of Honda's humanoid development project; over 6 feet tall, P2 was smaller than its predecessors and appeared to be more human like in its motions.
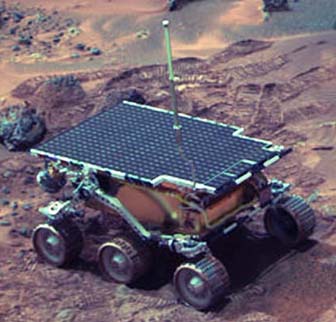
 In 1997 The Pathfinder Mission landed on Mars. Its robotic rover Sojourner, rolled down a ramp and onto Martian soil in early July. It continued to broadcast data from the Martian surface until September. Sojourner performed semi-autonomous operations on the surface of Mars as part of the Mars Pathfinder mission; equipped with an obstacle avoidance program, Sojourner was capable of planning and navigating routes to study the surface of the planet. Sojourner's ability to navigate with little data about its environment and nearby surroundings allowed the robot to react to unplanned events and objects. In 1997 The Pathfinder Mission landed on Mars. Its robotic rover Sojourner, rolled down a ramp and onto Martian soil in early July. It continued to broadcast data from the Martian surface until September. Sojourner performed semi-autonomous operations on the surface of Mars as part of the Mars Pathfinder mission; equipped with an obstacle avoidance program, Sojourner was capable of planning and navigating routes to study the surface of the planet. Sojourner's ability to navigate with little data about its environment and nearby surroundings allowed the robot to react to unplanned events and objects.
The robotic dog AIBO of Sony was introduced in 1999. The AIBO was capable of interacting with humans. Then Sony also revealed its Sony Dream Robots, small humanoid robots in development for entertainment
 The famous robot ASIMO of Honda was revealed as the most advanced result of Hondas humanoid project in 2000. ASIMO can run, walk, communicate with humans, interact with its environment, recognize voice and posture. The famous robot ASIMO of Honda was revealed as the most advanced result of Hondas humanoid project in 2000. ASIMO can run, walk, communicate with humans, interact with its environment, recognize voice and posture.
 On January 3rd and 24th the Mars rovers Spirit and Opportunity land on the surface of Mars. Launched in 2003, the two robots will drive many times the distance originally expected, and are still operating. On January 3rd and 24th the Mars rovers Spirit and Opportunity land on the surface of Mars. Launched in 2003, the two robots will drive many times the distance originally expected, and are still operating.
In 2005 Honda introduced an updated version of ASIMO that has new behaviors and capabilities.
A 4-legged robot called Starfish that was capable of of self modeling and learning to walk after having been damaged was created at Cornell University in 2006.
|